KIT - Karlsruher Institut für Technologie
Institut für Informationsmanagement im Ingenieurwesen (IMI)
Navigation überspringen
Home
Impressum
Datenschutz
Barrierefreiheit
KIT
en
suchen
suchen
Aktuelles
Team
Start
Team
Team
Team
Alumni / Alumnae
Doktorierendengalerie
Anfahrt
Forschung
Start
Forschung
Forschung
Labs
Start
Forschung
Labs
Labs
MaiRo
DSM
Forschungsprojekte
Start
Forschung
Forschungsprojekte
Forschungsprojekte
Laufende Projekte
Abgeschlossene Projekte
Kooperation mit FZI
Start
Forschung
Kooperation mit FZI
Kooperation mit FZI
Information Process Engineering
Intelligent Systems and Production Engineering
Publikationen
Dissertationen
Start
Forschung
Dissertationen
Dissertationen
Laufende Dissertationen
Abgeschlossene Dissertationen
Lehre
Start
Lehre
Lehre
Lehrveranstaltungen
Prüfungstermine
Abschlussarbeiten
International Department
Jobs
Startseite
Home
Impressum
Datenschutz
Barrierefreiheit
suchen
suchen
Campusplan
Campusplan
Institut für Informationsmanagement im Ingenieurwesen (IMI)
Startseite
Lehre
Abschlussarbeiten
Startseite
Aktuelles
Team
Forschung
Lehre
Jobs
Lehre
Lehrveranstaltungen
Prüfungstermine
Abschlussarbeiten
International Department
Abschlussarbeiten
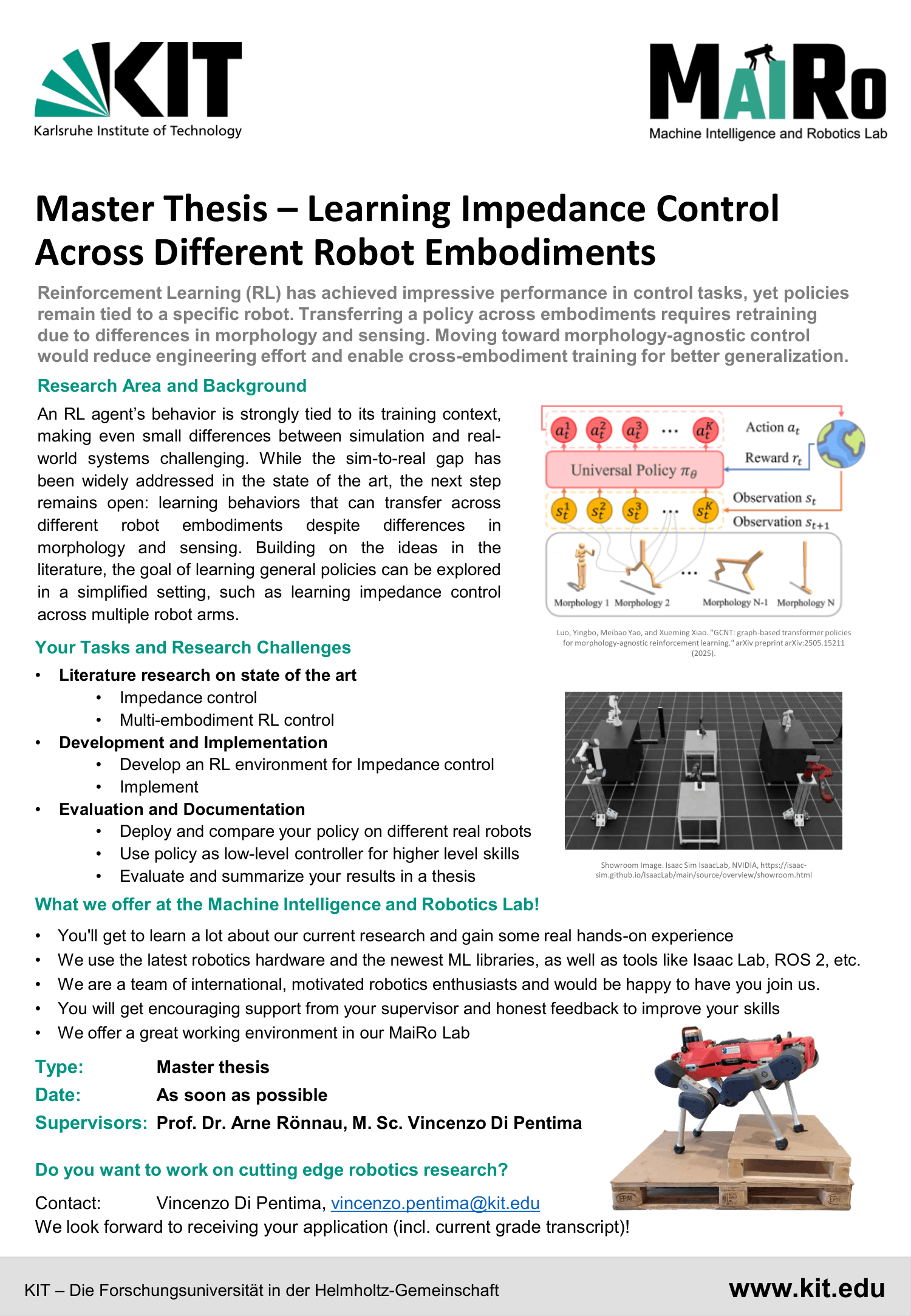
Learning Impedance Control Across Different Robot Embodiments
Typ:
Masterarbeit
Datum:
As soon as possible
Betreuung:
Prof. Dr. Arne Rönnau, M. Sc. Vincenzo Di Pentima
Zusatzfeld:
vincenzo.pentima@kit.edu