

3DConFu
- Ansprechperson:
- Projektgruppe:
- Förderung:
BMWi, ZIM-Kooperationsprojekt
- Projektbeteiligte:
IWOfurn Service GmbH
- Starttermin:
01.02.2014
- Endtermin:
31.01.2016
3D Raumrekonstruktion und intelligente Möbelkonfiguration
3DConFu: 3D Raumrekonstruktion und intelligente Möbelkonfiguration
Projektbeschreibung und Zielsetzung:
Die KMU-geprägte Möbelindustrie in Deutschland ist angewiesen neue innovative Lösung einzusetzen. Einerseits steht sie unter steigendem Leistungs- und Wettbewerbsdruck, der durch die wachsende asiatische Möbelindustrie geprägt wird, und anderseits sollen Lösungen zu den immer wachsenden Reklamationsquoten sowie steigende Kundenanforderungen gefunden werden. Ansatzpunkt des Projektvorhabens ist die Kundenkommunikations- und Planungsphase, bei der aktuell keine geeigneten Methoden existieren, sodass die Kunden zuverlässige und transparente Vorstellung über die künftigen Möbel bzw. Raumausstattung bekommen.
![]()
Das Ziel des Forschungsprojektes ist die Entwicklung eines Toolsets, um schnelle, flexible und kostengünstig durchzuführende Erfassung, 3D-Rekonstruktion und semantische Interpretation von bestehenden Räumlichkeiten bzw. Möbelmodellen durchzuführen. Darauf basierend sollen unterschiedliche Lösungen zur Visualisierung, Interaktion und Konfiguration von Möbeln in tatsächlicher Raumumgebung in 3D realisiert werden. Dadurch können KMU kostengünstige und kundenindividuelle Lösungen anbieten und gleichzeitig die Reklamationsquoten reduzieren.
Projektergebnisse:
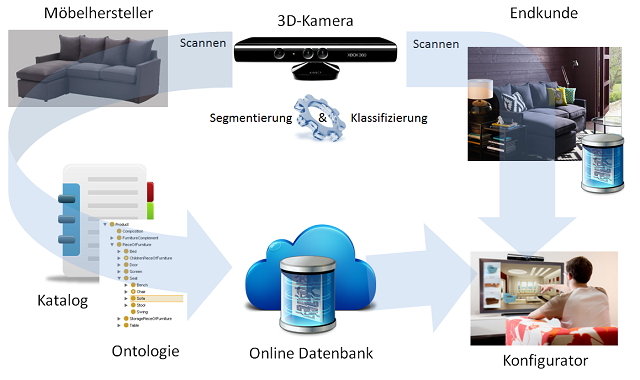
Während des Projektes 3DConFu wurden hochkomplexe, parallelisierte Algorithmen zur 3D-Erfassung und Rekonstruktion für einen handgeführten Scanner entwickelt (für mehr Details siehe KinKon). Da das Scanning in Echtzeit erfolgt, kann durch eine Anzeige der Datenqualität die Benutzerfreundlichkeit gesteigert werden. Darüber hinaus wurde ein kosteneffizienter Sensor aus dem Consumer-Bereich (Microsoft Kinect) verwendet, der seit mehr als fünf Jahren auf dem Markt und somit weit verbreitet ist. Die Algorithmen zeichnen sich durch das Aufnehmen von weitläufigen Szenen aus. Diese Algorithmen heben sich von konkurrierenden Produkten durch ebendiese weitläufige Erfassung ab. Der Scanner lässt sich mit einer sehr hohen Auflösung und Farberfassung betreiben. Zur Evaluierung der entwickelten Algorithmen für 3D-Erfassung, Rekonstruktion, Segmentierung und Klassifizierung ist eine Anwendung entstanden, die die Machbarkeit beweist.